Um sistema de coordenadas ortogonais curvilíneas Esféricas consiste na
definição de três parâmetros
únicos para cada ponto , ou seja duma correspondência bijectiva (de facto será necessário definir várias e por partes i.e. um Atlas) com , de tal maneira que as curvas obtidas pela fixação de qualquer par de parâmetros , ou seja,
(semi-recta passando pela origem com azimute
e inclinação )
(semi-círculo vertical com centro na origem, de raio e azimute
(circulo horizontal de raio centrado no eixo dos à altura
se intersectem em e sejam ortogonaisentre si,
qualquer que seja o ponto escolhido.
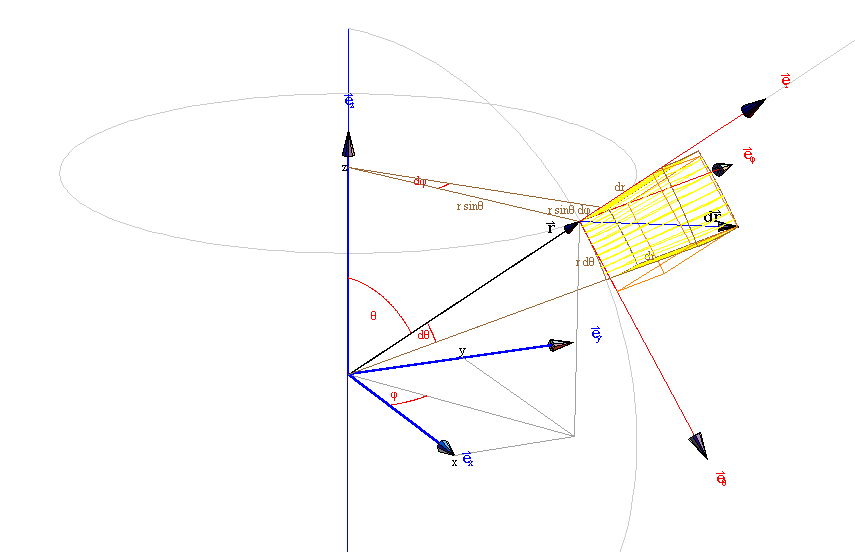
Ao triedro de vectores de módulo unitário
que representam no ponto as direcções tangentes a cada uma das curvas designamos por referencial móvel associado ao sistema de coordenadas curvilíneas
indicado.
O segmento de volume esférico
compreendido entre os raios , as inclinações e os azimutes mede
No limite infinitesimalmente pequeno pode mostrar-se equivalente ao volume paralelipipédico definido por
no referencial móvel associado. Expandindo
verifica-se
Quando
retemos apenas o termo de mais baixa ordem em produtos de infinitésimos, i.e.
.