Transformação das coordenadas de posição
O movimento dum ponto material depende do observador e do seu próprio estado de movimento. Em geral, dados dois sistemas de referência, = {,,} e = {,,,}, que se deslocam e rodam um em relação ao outro (i.e. as direcções de referência não permanecem paralelas), a transformação de coordenadas cartesianas dum vector do referencial para o referencial , cuja origem é sempre dada por , é
onde é a transformação linear determinada, no sistema , pela matriz
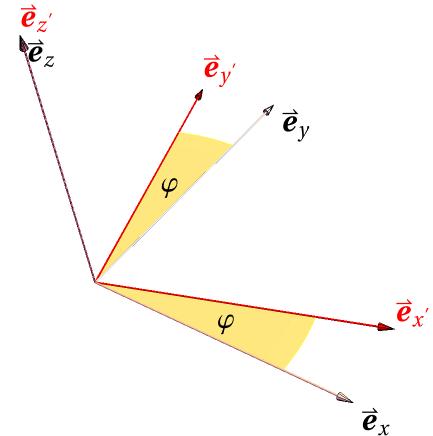
Por exemplo, para os sistemas e , com este último rodado em torno do eixo de por um ângulo , como indicado na figura, obtemos
|
|
Pela sua construção,
é uma matriz ortogonal, i.e.
.
Uma matriz destas possui valores próprios de módulo unidade (porque as rotações e reflexões preservam comprimentos), e um deles tem que ser real,
(porque a equação dos valores próprios é cúbica). O sinal depende de existirem, , ou não, , reflexões incluídas em
. A direcção dum vector próprio correspondente ao valor próprio real
é invariante para a transformação ortogonal
e define assim o eixo de rotação da transformação.
Por outro lado, se os produtos variarem no tempo, também
é variável no tempo, mas . Daqui se vê que, fazendo
,
Propriedades Gerais
Uma matriz que verifique diz-se anti-simétrica e tem a forma
Em três dimensões existe sempre um vector associado matriz anti-simétrica , tal que, para qualquer vector :
Por simetria se vê que, fazendo , também e portanto
porque a matriz ortogonal verifica .
Transformação da Velocidade
No caso da matriz anti-simétrica , a associação com o vector traduz–se na identificação (porque ), onde é a velocidade angular (de rotação das direcções de referência) de em .
Note que, como é ortogonal, ≡ e assim e portanto
ou seja
Transformação da Aceleração
Pode-se agora calcular o que será a aceleração :
Substituindo nesta expressão e relembrandro que e que ,
NB: .
Além disso, uma matriz ortogonal verifica (as transformações ortogonais preservam os ângulos entre vectores e as normas destes). Assim a expressão para pode ainda escrever–se, designando por a aceleração angular de em , e fazendo :
| © Amaro Rica da Silva, Prof. Dep. Física-IST with Mathematica (September 20, 2005) |