Colisão Elástica de duas partículas de massas
| Java Applet: Colisões elásticas de duas partículas. |
| Use Shift-Drag para Zoom; Use Left-Drag para rodar; Pontos (e vectores) selectionáveis apresentam um pequeno quadrado quando apontados pelo cursor, e podem então ser movidos com Left-Drag. |
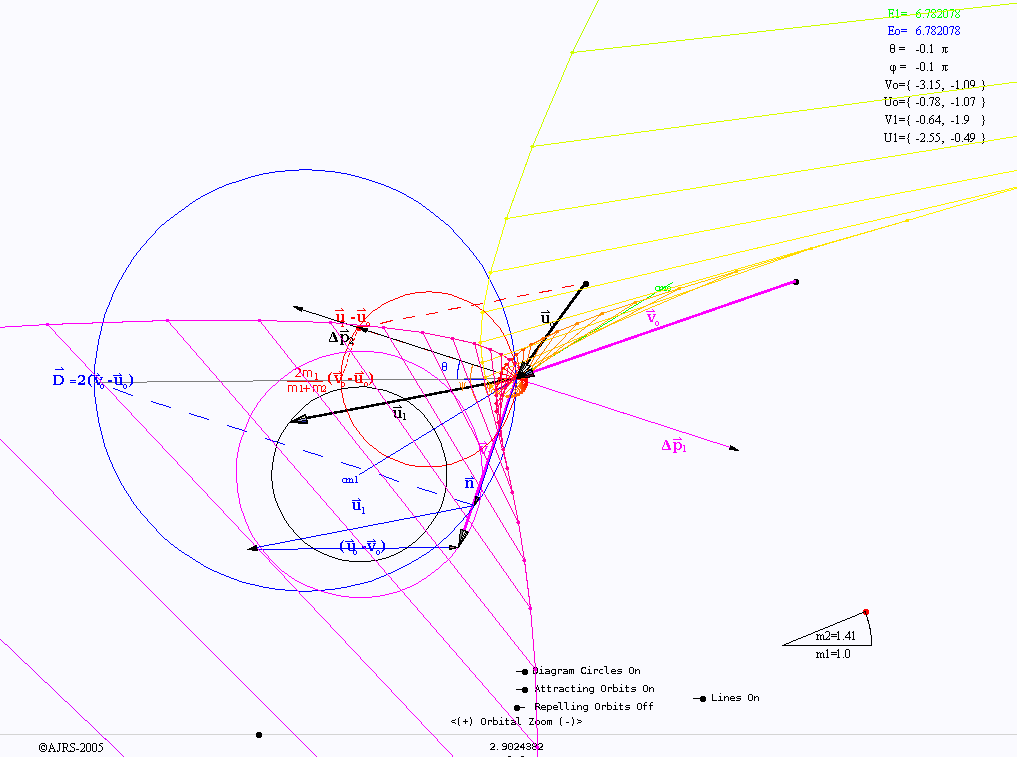
Colisão e trajetórias com interação atractiva.
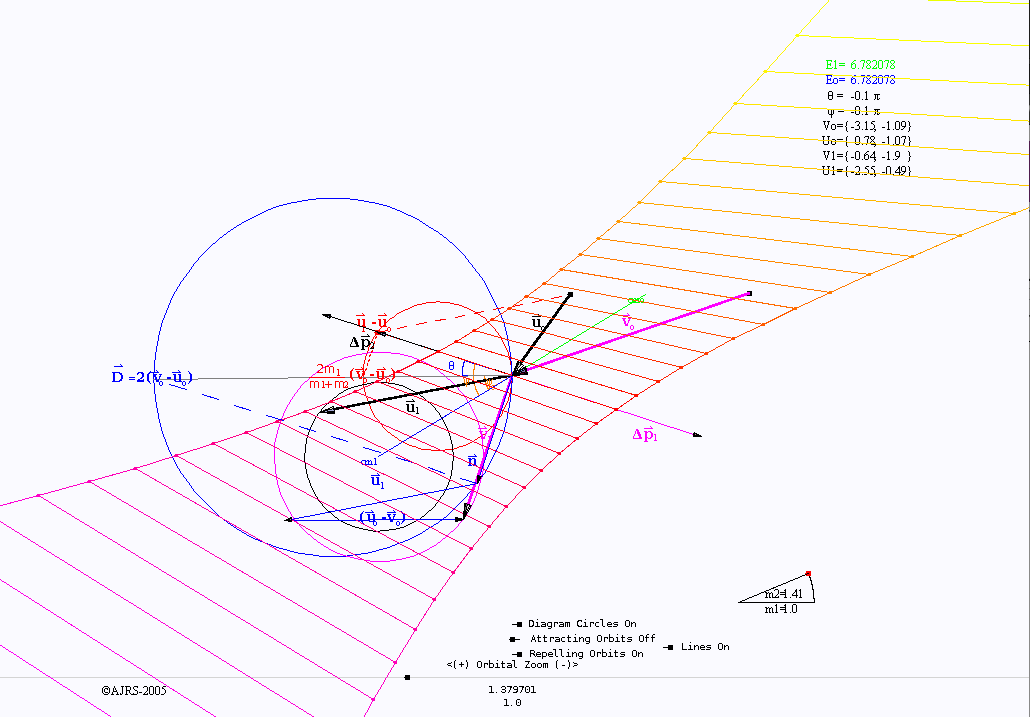
Colisão e trajetórias com interação repulsiva.
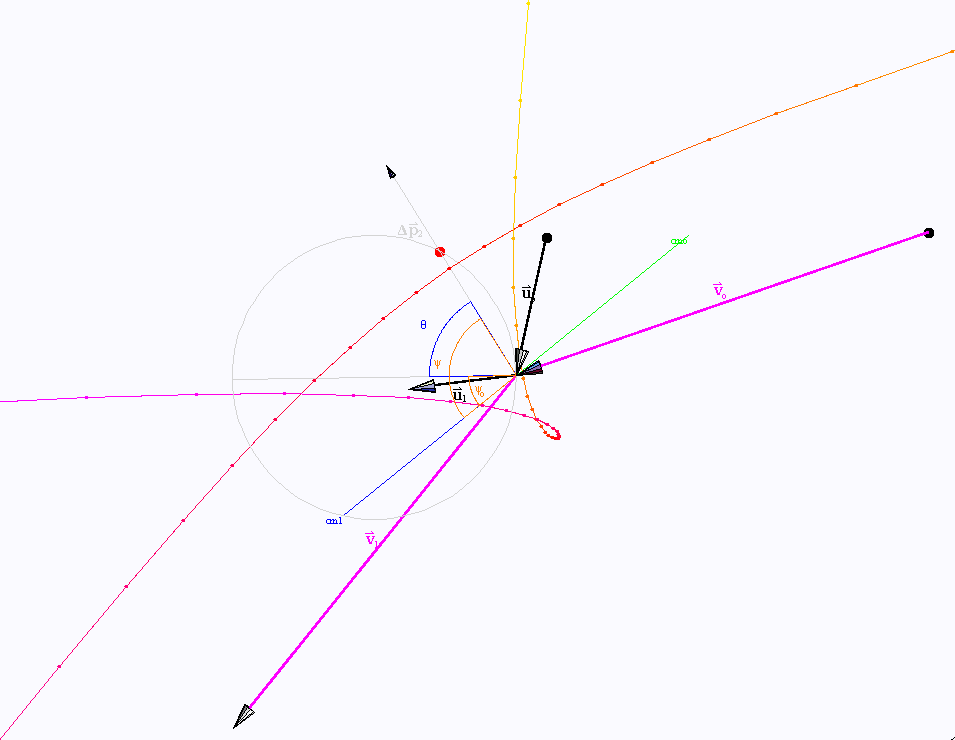
Colisão e trajetórias com interação atractiva.
Uma partícula em repouso (ou referencial próprio duma partícula)
Leis de Conservação
| (1) |
Determinação de
Substituindo () por no lado esquerdo, e por () no lado direito, da última equação de (1) obtemos
donde
| (2) |
Multiplicando a primeira equação em (1) por e substituindo aí este resultado (2) obtém-se
| (3) |
Designando a direcção de por =, esta expressão (3) dá-nos a sua magnitude =
Conhecido , isto determina completamente
| (4) |
Escrito doutra maneira, designando = em (3),
Conclui-se assim que é perpendicular a , isto é, é uma corda num círculo de diâmetro e centro em (vide Fig 1). Logo, designando por ,] o ângulo entre e , deduziríamos directamente da geometria que
![[Graphics:HTMLFiles/AmaroFig2.png]](HTMLFiles/AmaroFig2.png)
Figura 1
Construção geométrica
Contudo, para uma determinação puramente geométrica de , agora que conhecemos , devemos escrever a segunda equação de (1), substituindo () por no lado esquerdo, na forma
Podemos concluir que += , não sendo nulo, é um vector perpendicular a porque verifica ·=0. Daqui se deduz a expressão para
| (5) |
Multiplicando a primeira equação em (1) por este obtemos, substituindo (5),
| (6) |
onde a última expressão decorre do facto de 2 ser perpendicular a , o que significa que =2· onde = é o vector unitário na direcção de , e portanto perpendicular a e tal como anteriormente referido. Como impusemos ·=Cos[θ], sabemos que o que deve corresponder a ·=Sin[θ], donde resulta (6). Substituindo (4) , (8) e (6) em (5) obtemos
| (7) |
Determinação de a partir da Lei de Conservação do Momento Linear
Da conservação do momento linear em (1) devemos obter : se usarmos (4) e escrevermos
| (8) |
onde representa o vector unitário perpendicular a e paralelo a , obtemos de acordo com (7)
| (9) |
O ângulo φ entre e determina-se agora como
| (10) |
Apenas quando = (vide Fig. 2) se tem ou seja φ+θ=.
![[Graphics:HTMLFiles/AmaroFig3.png]](HTMLFiles/AmaroFig3.png)
Figura 2
Caso Geral
| (11) |
O mesmo tipo de raciocínio que anteriormente leva-nos a concluir de (11)
| (12) |
Multiplicando a primeira equação em (11) por e substituindo aí este resultado (12) obtém-se
| (13) |
Daí que se possa deduzir
| (14) |
onde
| (15) |
é a direcção de . Reescrevendo a equação (12) na forma
| (16) |
concluimos como anteriormente que se localiza num círculo de diâmetro . Finalmente, da segunda equação (11) obtém-se, por substituição da primeira no lado esquerdo
| (17) |
o que indica
| (18) |
Multiplicando a primeira equação em (11) por obtém-se
| (19) |
Obtemos assim que também se localiza num círculo de raio sendo perpendicular a
![[Graphics:HTMLFiles/AmaroFig5.png]](HTMLFiles/AmaroFig5.png)
Figura 3
As velocidades finais e anteriormente definidas determinam dois circulos concêntricos, com centro em O+= O+ após a colisão. Os respectivos raios serão
| (20) |
Como seria de esperar, as extremidades dos vectores , e estarão sempre numa linha recta depois da colisão. O diâmetro dos círculos anteriores coincide com a direcção de , e o máximo que pode atingir é 2||||, o que acontece quando uma das massas é muito superior à outra. Se por exemplo ≫, então ==. Quando =0 em geral =. Isto significa que quando →0, a diferença
| ||||=|||| → =|||| | (21) |
Exemplos
![[Graphics:HTMLFiles/AmaroFig1.png]](HTMLFiles/AmaroFig1.png)
Figura 4 - Slingshot
![[Graphics:HTMLFiles/AmaroFig9.png]](HTMLFiles/AmaroFig9.png)
Figura 5 - Breaking
| © Amaro Rica da Silva, Prof. Dep. Física-IST with Mathematica (September 20, 2005) |